Legged Locomotion on Compliant Terrains
One of the most intriguing research challenges in legged locomotion is robot performance on compliant terrains. The foot-terrain interaction is usually tackled by disregarding some of the affects of ground deformation, like permanent deformation and compaction, restricting application to stiff terrains. In the case of fast dynamic walking, it is reasonable to consider the stance phase as an impact between the toe and the ground. In principle, such impacts can be modeled via three methods: the steremechanical theory method, which does not take into account the entire impact phase but considers it as a discontinuity, the Finite Element Method (FEM), which is computationally demanding and difficult to use online, and the compliant/viscoelastic approach, which seems more appropriate, as different terrains can be described by lumped parameter models with suitable properties.
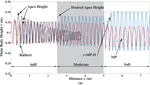
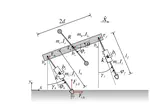
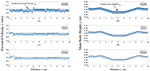
Therefore, in our work, an impact dynamics model is developed, employing a viscoplastic extension of viscoelastic impact models, and used to study the performance of a monopedal robot. The model of the robot incorporates the description of the foot-terrain interaction, in order to describe the effects of terrain compliance. At the same time, a novel controller immune to ground energy dissipation is developed, which does not require knowledge of ground parameters. The controller adapts to terrain changes quickly and successfully tackles the problems arising during impacts, controlling the hopping height and speed with a single actuator. Simulation results demonstrate the validity of the developed analysis, which is also extended to pronking quadrupedal robots.