Vasileios Vasilopoulos
Vasileios Vasilopoulos
About
Publications
Contact
Light
Dark
Automatic
1
Sensor-Based Legged Robot Homing Using Range-Only Target Localization
This paper demonstrates a fully sensor-based reactive homing behavior on a physical quadrupedal robot, using onboard sensors, in simple …
Vasileios Vasilopoulos
,
Omur Arslan
,
Avik De
,
Daniel E. Koditschek
PDF
Video
Code
BibTeX
Quadruped Pronking on Compliant Terrains Using a Reaction Wheel
While legged locomotion is a rapidly advancing area in robotics, several issues regarding the performance of such robots on deformable …
Vasileios Vasilopoulos
,
Konstantinos Machairas
,
Evangelos G. Papadopoulos
PDF
Video
BibTeX
Towards Bipedal Behavior on a Quadrupedal Platform Using Optimal Control
This paper explores the applicability of a Linear Quadratic Regulator (LQR) controller design to the problem of bipedal stance on the …
T. Turner Topping
,
Vasileios Vasilopoulos
,
Avik De
,
Daniel E. Koditschek
PDF
BibTeX
Control and Energy Considerations for a Hopping Monopod on Rough Compliant Terrains
Terrain compliance is a critical parameter for the performance of legged locomotion. In this work, a single actuator monopod robot …
Vasileios Vasilopoulos
,
Iosif S. Paraskevas
,
Evangelos G. Papadopoulos
PDF
Video
BibTeX
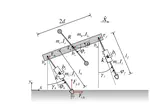
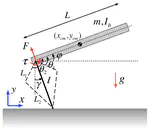
Monopod Hopping on Rough Planetary Environments
Recent successes of missions such as the MSL and the Rosetta have increased the interest in the robotic exploration of other planets …
Vasileios Vasilopoulos
,
Iosif S. Paraskevas
,
Evangelos G. Papadopoulos
PDF
BibTeX
Compliant Terrain Legged Locomotion Using a Viscoplastic Approach
Legged locomotion is a rapidly advancing area in robotics, yet still a large number of open questions exist. This work focuses on the …
Vasileios Vasilopoulos
,
Iosif S. Paraskevas
,
Evangelos G. Papadopoulos
PDF
BibTeX
«
Cite
×