Abstract
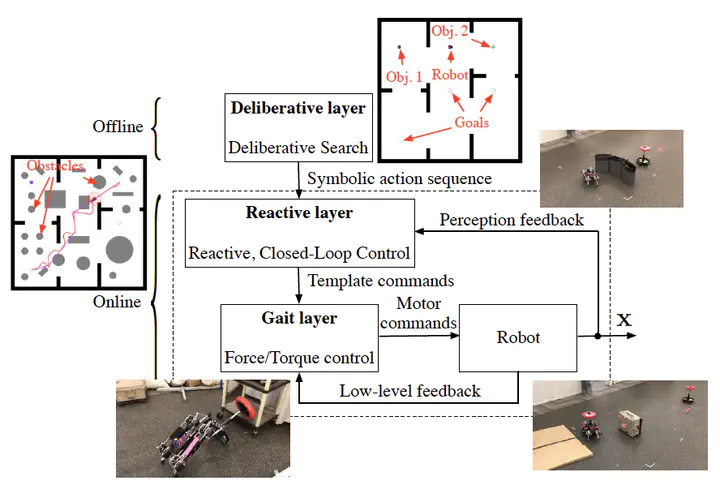
Research Statement, summarizing the recent work in reactive planning and mobile manipulation with legged robots.
Type
Publication
In RSS Pioneers 2020
Research Statement, summarizing the recent work in reactive planning and mobile manipulation with legged robots.