Abstract
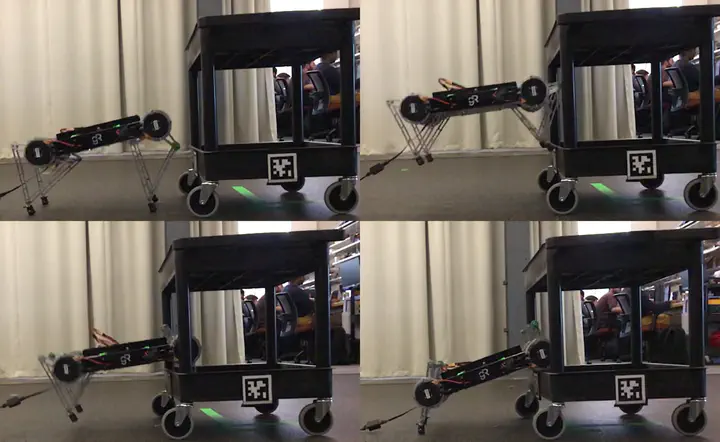
We document the reliably repeatable dynamical mounting and dismounting of wheeled stools and carts, and of fixed ledges, by the Minitaur robot. Because these tasks span a range of length scales that preclude quasi-static execution, we use a hybrid dynamical systems framework to variously compose and thereby systematically reuse a small lexicon of templates (low degree of freedom behavioral primitives). The resulting behaviors comprise the key competences beyond mere locomotion required for robust implementation on a legged mobile manipulator of a simple version of the warehouseman’s problem.
Type
Publication
In The International Symposium on Robotics Research (ISRR)